Project Leader
Yariv Bachar
MSc, School of
Informatics, University of Edinburgh |
Project Supervisor
Sethu Vijayakumar, PhD
IPAB, School of
Informatics, Univ. of Edinburgh |
Project Title
Developing Controllers for Biped Humanoid Locomotion

Project Goal
For decades biped
humanoid locomotion has been a major focus of robotics research. Many
theoretical studies along with much simulation and practically realized
systems have been researched up to the Honda and Sony humanoid robots -
the most modern and advanced biped locomotion robots.
Maintaining dynamic
stability during locomotion is fundamental for developing realized
humanoid robots which are able to operate in real world environment.
This project
involves with generating walking gaits for a full body humanoid simulation
with physics (already available through
Webots
simulation software). The simulator already provides the basic commands to
sense and command individual motors. The key challenge is to devise a
control scheme which will ensure robust walking pattern and the ability to
recover from stumbling.
The
principle goal of the project is to develop a natural looking walking gait
(initially static, later dynamic) for a full body 25DOF humanoid robot.
Ideally, our aim was to incorporate Zero Moment Point (ZMP) control for
generating dynamically stabled walking.
Programming interface is in C/C++ and there are sample modules
available (in Webots) which assist in tracing individual
joint trajectories.
The project is
decomposed to the following phases:
- Literature
review and Environment setup for simulations:
-
Literature review
of related research - material collection and reading of related papers.
-
Webots
and additional libraries and packages setup.
- Design and
implementation of ZMP control algorithms/methods:
- ZMP
statically stable control implementation.
- ZMP
dynamically stable control implementation.
- Experimenting
with the various ZMP control methods and adjustment:
- Running
simulations using various control methods implemented.
- Evaluation
and analysis of results.
-
Write-up/Conclusion:
- Preparing
the dissertation.
-
Presentation of the project.
Project Timeline
|
Time Frame |
Task (completed or
scheduled) |
|
| 1
May. 04 - 21 May. 04 |
Material collection and reading; Environment setup. |
C |
| 22
May. 04 - 26 Jun. 04 |
Control algorithms/methods design and implementation. |
C |
| 10
Jun. 04 |
Group Review meetings. |
C |
| 27
Jun. 04 - 27 Jul. 04 |
Experimenting with control algorithms/methods; Improvement of
control methods. |
C |
| 28
Jul. 04 - 1 Sep. 04 |
Dissertation write-up; Preparing project presentation. |
C |
| 2
Sep. 04 |
Dissertation submission. |
C |
| 3
Sep. 04 - 10 Sep. 04 |
Project presentation. |
C |
Project Results & Conclusions
MSc
Thesis (PDF, 4.23 MB).
Presentation slides
(ZIP, 2.68 MB).
Source Code (TGZ,
392 KB).
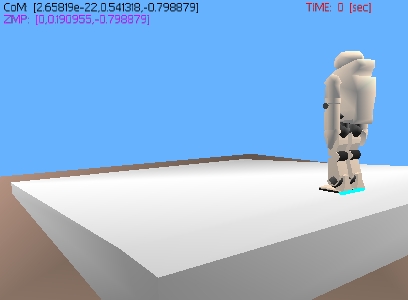
Snapshot I -
Humanoid walking in a downhill experiment.
Snapshot II
- Humanoid walking with external force experiment.
Snapshot
III - The Humanoid in a slope environment.
Movie I -
The humanoid walking on the standard horizontal stage.
Movie II -
The humanoid walking on the standard environment with external head wind
force.
Links
Robotics Research
Tools
-
Webots - Award winning mobile
robotics simulation software.
-
Roboop - A robotics
object oriented package in C++.
-
NEWMAT - A
comprehensive matrix library in C++.
-
Arabica - An
XML parser toolkit, providing SAX2 and DOM implementations.
-
ODE - Open Dynamics Engine by Russell
Smith.
-
CGAL - Computational Geometry
Algorithms Library in C++.
-
OpenGL - The Industry's Foundation
for High Performance Graphics.
-
OSE -
a generic application framework for constructing general purpose
applications.
|
{kind=link}
{kind=link}
{kind=link}